Publications
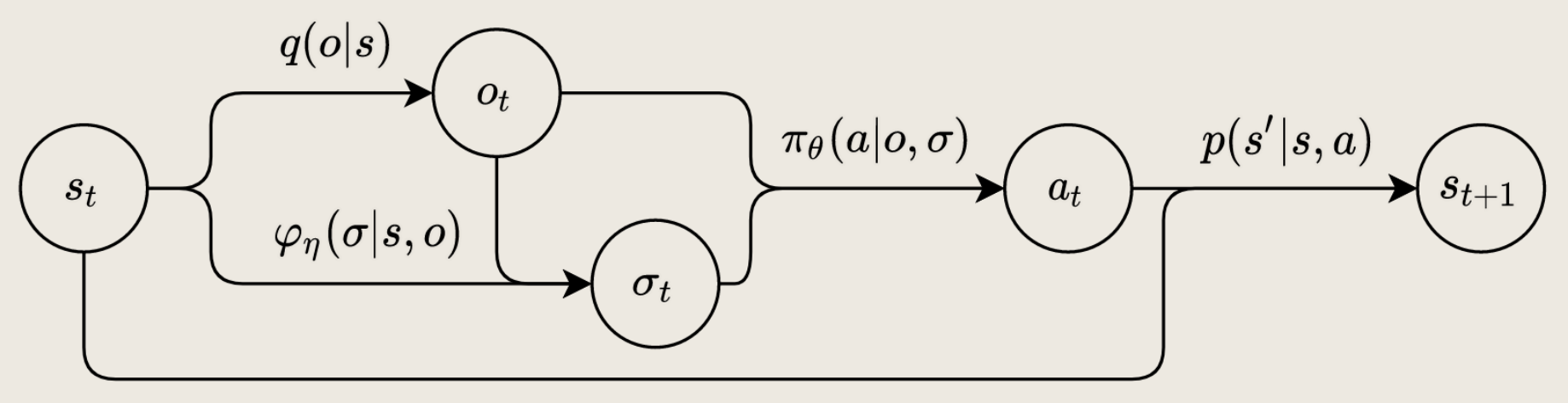
Multi-Agent Reinforcement Learning | 多智能体强化学习中的信息设计
Yue Lin, Wenhao Li, Hongyuan Zha, Baoxiang Wang. NeurIPS 2023. This is currently my most representative work.
Multi-Agent Reinforcement Learning | Information Design in Multi-Agent Reinforcement Learning
Yue Lin, Wenhao Li, Hongyuan Zha, Baoxiang Wang. NeurIPS 2023. This is currently my most representative work.
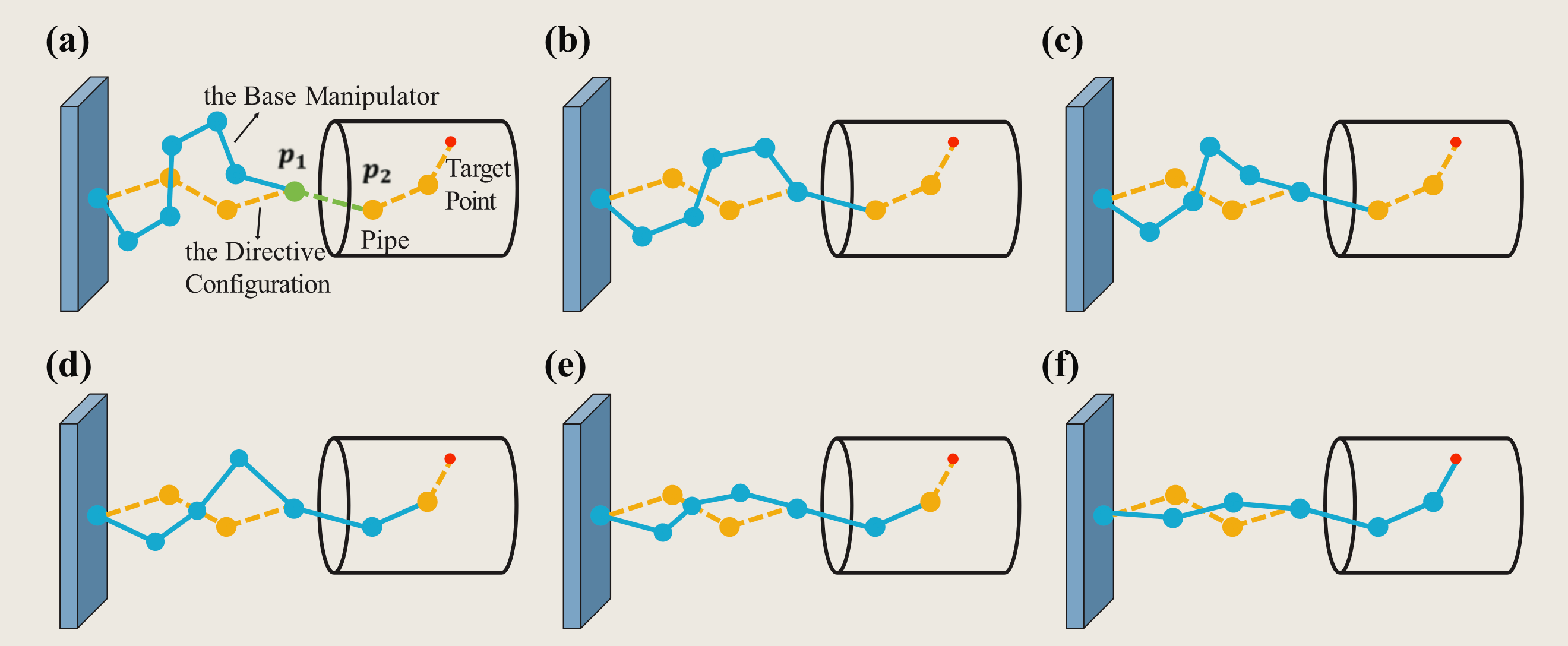
Robotics | Swinging Search and Crawling Control
Yue Lin, et al. A snake-inspired path planning algorithm based on reinforcement learning and self-motion for hyper-redundant manipulators. International Journal of Advanced Robotic Systems 2022.
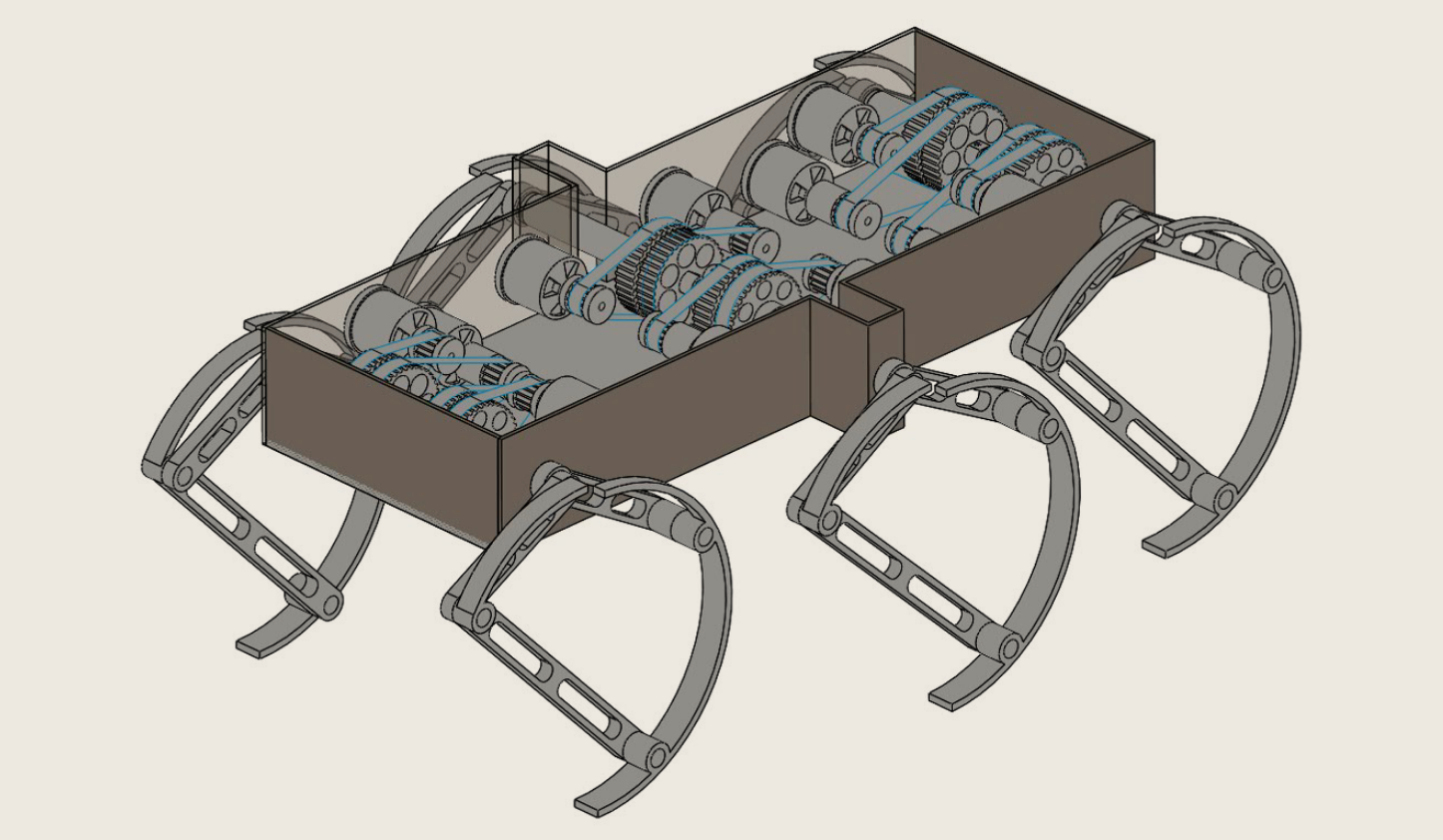
Robotics | RHex-T3: A Mobile Robot, with Hybrid Leg Design
Please be aware that the videos accompanying this article may take some time to load, depending on the speed of your internet connection to GitHub. Innovative design and simulation of a transform...