Swinging Search and Crawling Control
Please be aware that the video accompanying this article may take some time to load, depending on the speed of your internet connection to GitHub.
A snake-inspired path planning algorithm based on reinforcement learning and self-motion for hyper-redundant manipulators
SSCC = Swinging Search (self-motion for path planning) and Crawling Control (crawling into the pipe like a snake)
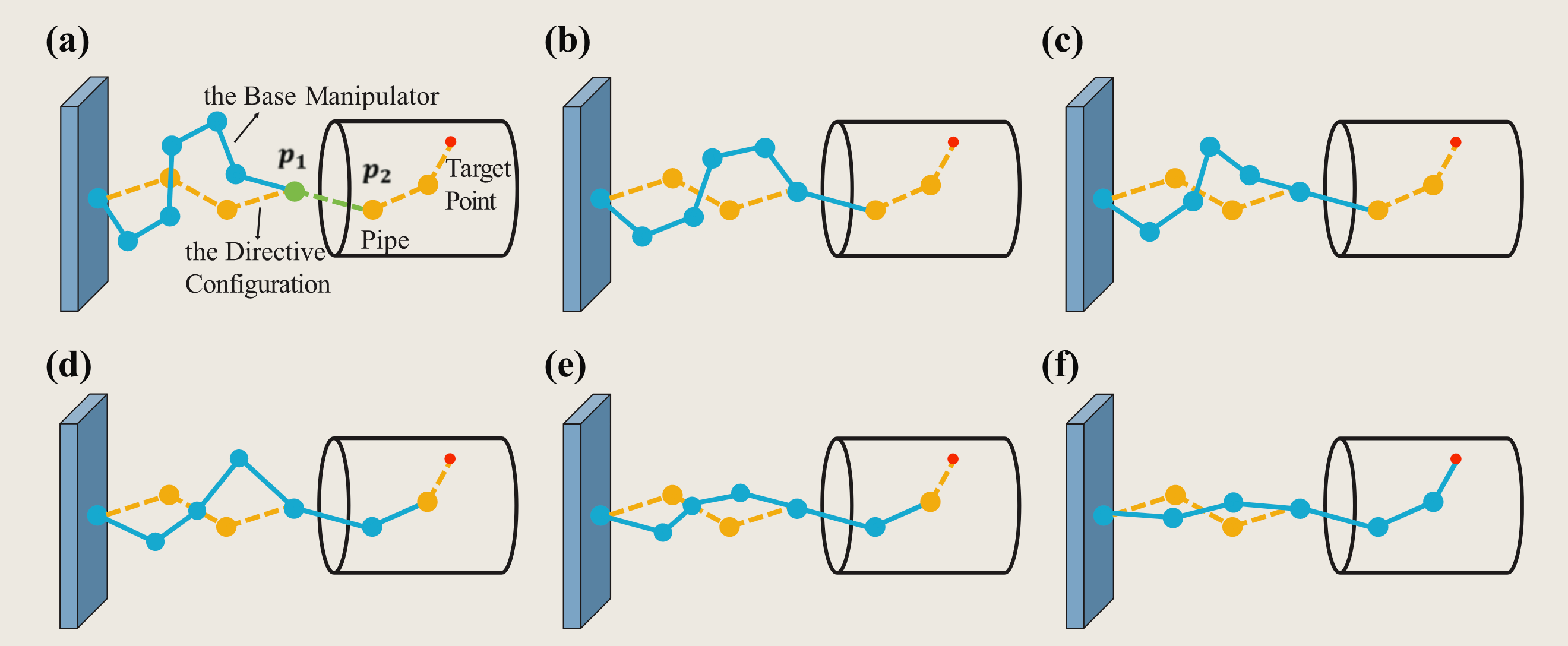
Self-motion is a special kind of motion for redundant manipulators. Given a fixed base and an end target, there can be more than one possible solution configuration due to its redundancy. Searching configurations (for a collision-free path) within these constraints (fixing both ends of a manipulator) can be likened to a rope swinging in the air.
Keywords:
- Redundant Manipulator
- Path Planning
- Control
- Reinforcement Learning
Videos
Crawling Control: a 16 DoF manipulator crawling into a simple pipe.
Resources
This post is licensed under CC BY 4.0 by the author.