RHex-T3: A Mobile Robot, with Hybrid Leg Design
Please be aware that the videos accompanying this article may take some time to load, depending on the speed of your internet connection to GitHub.
Innovative design and simulation of a transformable robot with flexibility and versatility, RHex-T3
RHex-T3 = RHex - To The Top (for it can climb ladders)
RHex is a highly successful robot with excellent properties. The robot has six legs that are shaped like semicircles, with a motor installed at the end of each arc. We have redesigned its legs to perform a wide range of functions.
Keywords:
- Robotic Mechanism Design
- Mobile Robot
- Kinematics
Resources
A substantial amount of code I wrote (kinematics, simulation, physical control) cannot be made public, because the lab I used to work will continue to conduct related research.
Videos
This work is self-explanatory, as the videos that follow are easy to understand.
Overview
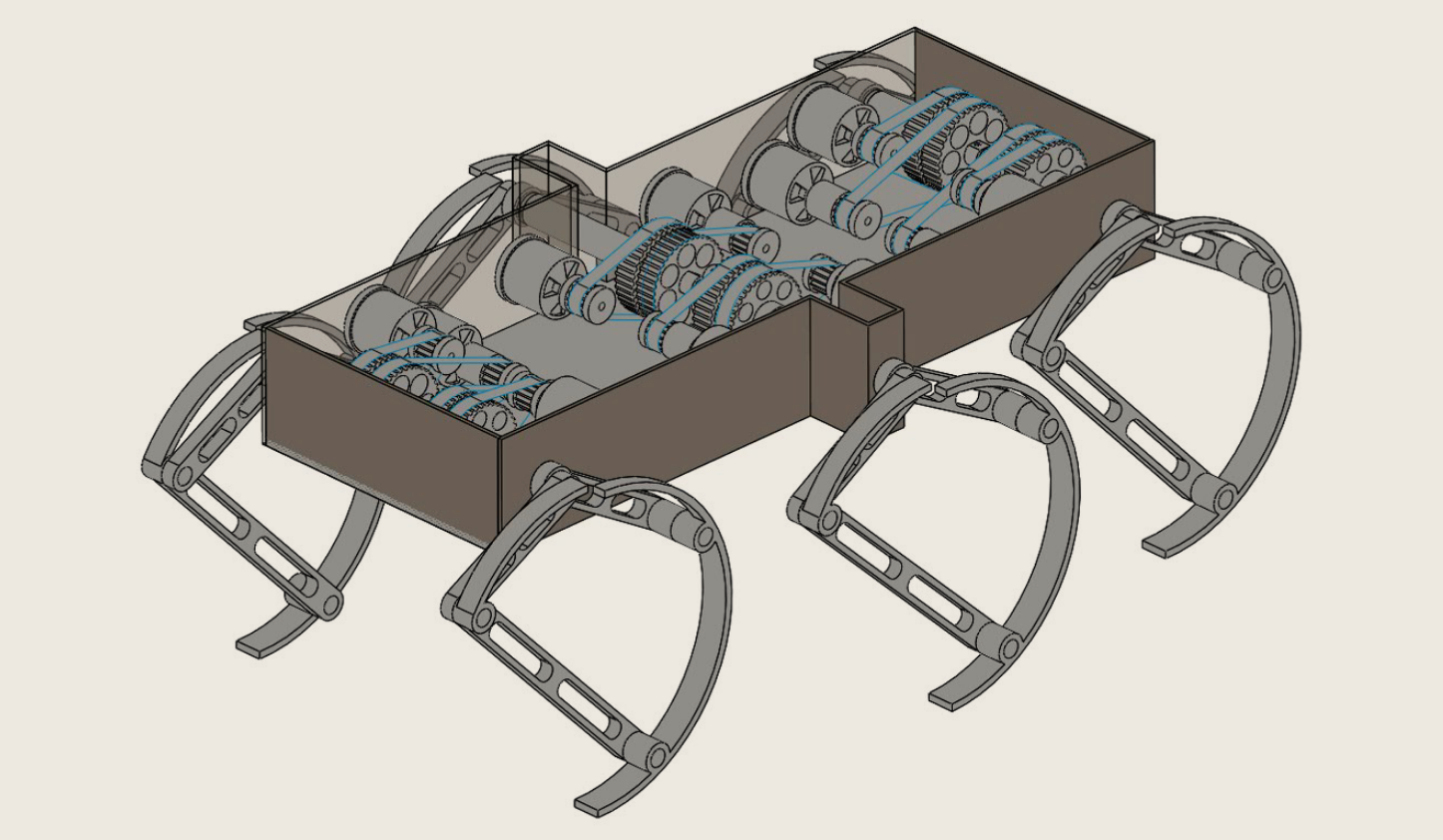
Exploded View
Transmission System
Workspace
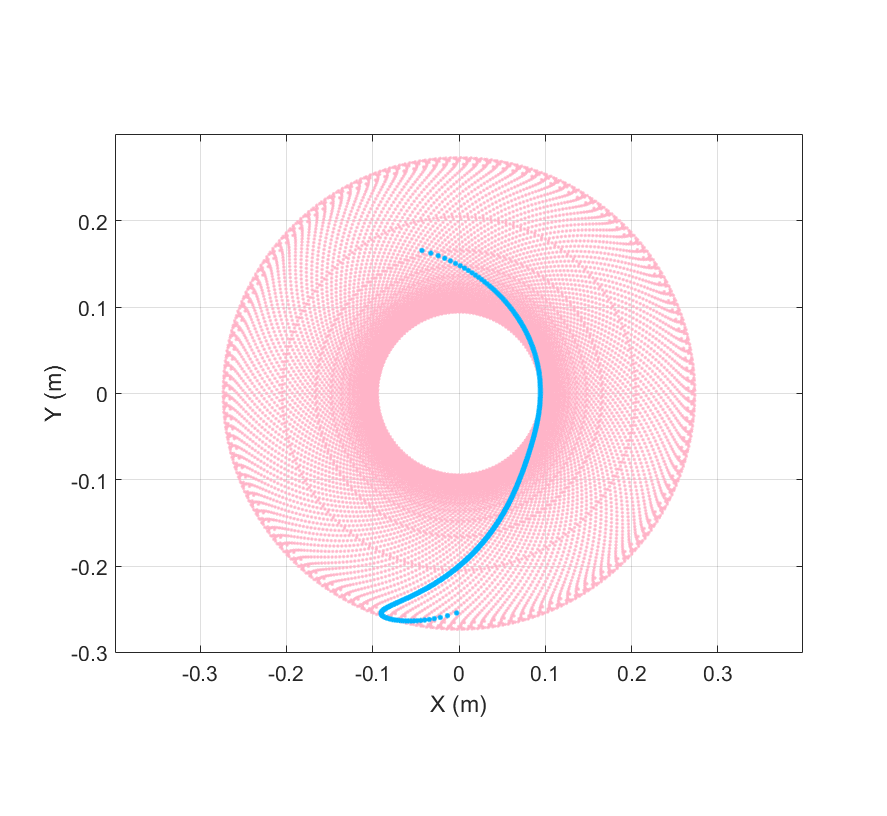 Workspace
Workspace
Hook Mode
Leg Mode
RHex Mode
Mode Switching
Wheel Mode
This post is licensed under CC BY 4.0 by the author.